보행, 로코모터(locomotor)의 첫 번째 기능: 입각 안정성 (1-2-1). 이 글은 로코모터의 첫 번째 기능, '입각 안정성'에 대한 개념을 설명하고 해당 기능이 우리 몸의 안정성을 어떻게 유지하는지에 대해 다루었습니다. 각 원리와 상호작용을 통해 우리가 직립 자세를 유지하고 보행 중에도 안정적으로 움직일 수 있는 흥미로운 생체 역학적 원리들이 소개되었습니다.

"보행, 로코모터(locomotor)의 첫 번째 기능: 입각 안정성 (1-2-1)"
로코모터(locomotor)의 첫 번째 기능으로서의 '입각 안정성'은 인체의 훌륭한 설계와 운동 기능의 균형을 이루는 중요한 역할을 합니다. 이 기능은 각 분절이 자체 무게에 의해 떨어질 수 있는 상태에서부터 시작하여, 직립 자세와 보행 중의 안정성을 확보하기 위해 다양한 생체 역학적 원리에 의존합니다.
1) 동적인 안정성: 중력중심과 기능적 균형
로코모터(locomotor)의 입각 안정성은 수동적인 안정성의 한 예로 볼 수 있습니다. 각 분절의 중력 중심이 관절 바로 위에 위치할 때, 기능적인 안정성이 확보되며 에너지 소비가 최소화됩니다 (Volker 1992). 이것은 우리 몸이 자연스럽게 안정된 상태로 유지되기 위한 기본 원리 중 하나입니다.

- 근육이나 인대가 제어하지 않는다면,
신체의 각 분절은 자기중량에 의해서 바닥에 떨어져 버릴 것이다.
직립자세에서 안정성을 얻기 위해
각 분절의 직립자세와 각 관절 주위의 근육 활동의 기능적 균형이 필수불가결한 것.
2) 도전적인 조건: 로코모터와 패신저의 차이
로코모터는 "로코모터(locomotor)"와 "패신저(Passenger)"의 크기 및 중량 차이, 지지를 하는 다양한 분절의 하지, 그리고 골단이 둥근 하지의 뼈(골)와 같은 도전적인 조건에 직면합니다. 이러한 조건들은 안정성을 유지하는 데 도전적이며, 로코모터는 이러한 도전에 대처하기 위한 고유의 방법을 발전시켜 왔습니다.
위에 3개의 해부학적인 실태
- "로코모터"와 "패신저"의 크기 및 중량 차이
(전체 중량의 30%인 "로코모터"에 전체 중량의 70%인 "패신저"가 올라타 있다.)
- 지지를 하는 다양한 분절의 하지
- 골단이 둥근 하지의 뼈(골)
=> 오히려 안정성을 확보하기 위해서는 오히려 매우 불리한 조건일 수 있음(Perry 1992)

3) 지면 반응력과 안정성
신체의 안정성은 신체 중력에 의해 발생하는 힘이 지면 반응력으로 변환되는 과정에서 결정됩니다. 뉴턴의 제 3법칙에 따라 신체의 중력으로 발생하는 힘이 지면에 작용하면, 지면은 동일한 크기의 반작용을 일으킵니다. 이러한 반응력은 지면 반응력 벡터로 표현되며, 이 벡터의 크기와 방향은 관절 주위의 회전 모멘트를 결정합니다.
- 신체를 똑바로 지지하는 것은 무엇보다도 우선되는 과제
서 있을 때와 걷고 있을 때의 안정성에 대한
신체중량의 영향은 지면 반응력 벡터(vector)에 의해서 결정된다.
신체중량에 의한 힘이 바닥에 작용하면,
반대방향으로 같은 크기의 반작용이 일어난다(뉴턴의 제 3법칙).
이 힘은 그 나름의 장치가 있으면, 계측되어 정리된 벡터로서 나타낼 수 있다.
이것은 지면 반응력 벡터라 불리고,
지면 반응력 벡터의 연장선이 지면 반응력 작용선이다.
이 지면 반응력 작용선의 방향에 의해서
즉, 관절 중심과의 관계에서, 관절주위의 회전 모멘트의 방향과 크기가 결정된다.(불안정성)
그리고 안정성을 얻기 위해, 필요한 근육이나 인대의 장력이 발생한다.

4) 인대와 근육의 역할: 안정성을 위한 필수 장치
인체의 골격 시스템은 기계적으로는 안정되지 않은 상태이지만, 근육, 인대, 관절낭 등의 생체 재료와 메커니즘을 활용하여 안정성을 확보합니다.
특히 관절에 작용하는 세 가지 힘
- 바닥을 향하는 분절의 자기 중량
- 인대의 장력
- 근육의 수축력
이들이 조화를 이루어 동작하면서 안정성을 유지합니다.
인대로 연결된 골격 시스템의 구성은
기계적으로 보면 안정되어 있다고 하기보다는 오히려 불안정한 균형 상태.
하지의 뼈(골)의 대부분은 장관골이고,
관절면은 둥글게 되어있으므로 안정성에는 공헌하지 않음.
오히려 반대로 안정성을 얻는 것을 매우 곤란하게 한다.
각 분절의 중력중심이 일직선상에 없을 때,
상위에 있는 분절은 바닥을 향해서 무너진다.
그러므로 제어하는 힘이 반드시 필요하다.

고관절과 슬관절은
인대의 장력과 분절의 자기 중량의 균형을 이용하여
수동적인 안정을 얻고 있다. 이것은 과신전위치에서 일어난다.
과신전 때, 슬관절은 후십자인대에 의해서,
고관절에서는 장골대퇴인대에 의해서 움직임이 정지한다.
이들의 관절이 과신전하면,
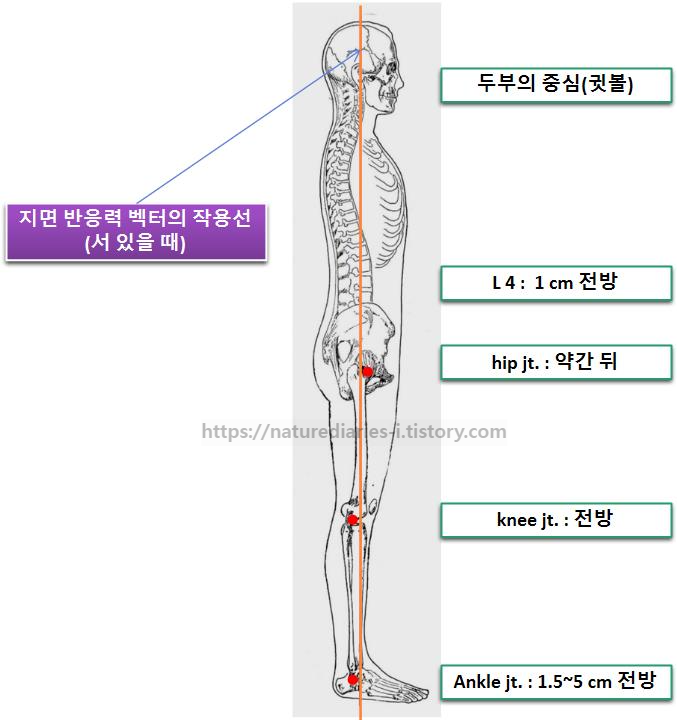
선 자세에서 지면 반응력 벡터는 고관절의 후방과 슬관절의 전방을 통과한다.
이 자세에서 이들의 관절은 2개의 대립하는 힘(지면 반응력 작용선의 위치에 따른 힘과 인대의 장력)에 의해서 안정된다.
거퇴관절과 거골하관절은 같은 수동적인 안정성을 얻을 순 없음.
그 이유는
중간 위치에서 양 방향으로 크게 움직이는 가동범위와
족관절이 발의 중간이 아니라,
중족지절간관절에서 멀리 발꿈치의 가까이에 있기 때문
그러므로 지면 반응력 벡터는 족관절의 약 5cm 전방을 통과.
안정성을 얻기 위해 5도 배굴과 가자미근의 활동이 필요.
그러나 가만히 서 있는 자세는 완전히 안정되어 있는 것은 아님.
1초간에 4~6회, 균형을 잡기 위한 약간의 움직임이 끊임없이 일어남.
이때 신체 중력중심은 좌우로 5mm, 전후로 8mm 움직인다.
이 약간의 신체의 흔들림에는 두 가지 원인이 있다.
- 심장의 고동(펌프의 움직임에 수반하는 질량의 이동 = 중력중심의 이동)
- 심부 감각이 충분하지 않기 때문
❓ "심장의 고동"
이는 심장의 펌프 움직임에 따라 몸의 질량이 이동하는 것 의미.
❓ "심부 감각이 충분하지 않기 때문"
이는 몸의 감각 체계가 흔들림을 완전히 제어하기에는 충분하지 않다는 것을 의미.
이렇듯, 가만히 서 있는 자세에서의 미세한 움직임은
신체가 안정성을 유지하고 균형을 맞추기 위한 자연스러운 반응이며,
이러한 움직임은 심장의 고동과 심부 감각의 상호작용에서 비롯된 것으로 이해.
5) 동적인 안정성: 보행 중의 움직임
로코모터(locomotor)의 입각 안정성은 보행 중에도 지속되어야 합니다. 보행 중에는 정적인 안정성보다는 동적인 안정성이 더 중요하게 작용합니다. 신체의 중력 중심은 전방으로 움직이며, 발의 지지면도 발꿈치에서 발끝까지 이동합니다. 이러한 동적인 안정성은 외부 힘에 대응하여 근육의 수축력과 연부 조직의 긴장력을 통해 유지됩니다.
- 동적으로 안정하여 있을 때,
즉 보행 중에는 정적으로 안정하여 있을 때(선 자세)와는 달리,
신체 중력중심은 지지면의 바로 위에서 벗어나 전방으로 움직여진다.


발은 신체를 유지하고 지지하지만,
이때 신체는 발의 뒤에 있는 위치에서 앞으로 운반된다.
이 때 발바닥의 지지면은 발꿈치로부터 발바닥 전체를 지나, 발끝으로 이동한다.
이상의 이유에 따라, 보행 중의 입각기에서는 신체에 수동적인 안정성이 부족하다.
중간 입각기에만 극히 약간의 시간, 수동적인 안정성과 유사한 것이 발생한다.


보행 중의 입각 안정성은 외부 힘의 작용에 대해서 확보되어야 한다.
이들은 관절 주위에서 회전 모멘트를 발생시키는 관성력과 중력과 지면 반응력이다.
❓작용하는 외부 힘들:
> 관성력: 관절 주위에서 회전 모멘트를 발생시키는 힘으로,
움직임의 방향과 속도를 유지하려는 성질.
> 중력: 지구가 끌어당기는 힘으로, 신체를 아래로 당기는 힘이며, 이는 보행 중에 중요한 역할.
> 지면 반응력: 발이 지면에 가하는 힘의 반작용으로, 신체의 안정성을 확보하는 데 기여.
외부 힘에 반작용하여
안정성을 유지하기 위해
근육의 수축력과 연부조직의 수동적 긴장력이 작용.
근육은 움직임을 생성하고 제어하는 역할을 하며,
연부조직은 관절을 감싸거나 지지하여 안정성을 제공.
이것에 의해서 균형을 상실함이 없이
가고 싶은 방향으로 좋아하는 움직임으로 안정된 상태로부터
동적 안정의 상태로 또는 보다 제어된 이동의 상태로 옮겨갈 수 있다.
6) 한쪽 다리 지지와 준비운동
한쪽 다리를 들었을 때의 안정성은 양 발이 지면에 접촉하는 경우와는 다릅니다.
이때는 체간이 외측으로 기울어지고, 고관절을 통해 안정성을 유지합니다.
이러한 변화에 대응하기 위해 신체 질량의 가로 이동 및 고관절의 안정화를 위한 준비운동이 필요합니다.
- 양 발이 바닥에 접하여 있을 때, 체간은 양측으로 지지.
하지만,
한쪽 다리를 바닥에서 떼면 이 균형은 상실하게 되고,
이 때문에 "패신저"의 중력중심은 외측(지지하는 다리)으로 옮겨지게 됨.

이때 발생하는 힘은 고관절을 통해서 전달된다.
한쪽 다리에 의한 안정성을 확보하기 위해서는, 두 가지 준비운동이 필요하다.
① 신체 질량의 가로방향으로의 이동
② 골반과 체간의 자세를 유지하기 위한 고관절의 안정화
"로코모터(locomotor)의 첫 번째 기능: 입각 안정성 (1-2-1)"을 마무리하며,
로코모터(locomotor)의 입각 안정성은 우리 몸이 자연스럽게 안정된 상태에서 동작하는 놀라운 메커니즘 중 하나입니다. 이 기능은 정적인 안정성과 동적인 안정성을 통해 우리가 보다 효과적이고 안정적으로 걸을 수 있도록 지원하고 있습니다. 앞으로도 로코모터(locomotor)의 다양한 기능을 탐험하면서 몸의 미묘한 예술을 함께 알아가 보도록 하겠습니다.
[ 다음 글 ]
"보행, 로코모터(locomotor)의 두 번째 기능: 흔들지레(Rocker) 기능과 전방 움직임, 걷기의 미묘한 조화(1-2-2)"
"보행, 로코모터(locomotor)의 두 번째 기능: 흔들지레(Rocker) 기능과 전방 움직임, 걷기의 미묘한 조
보행, 로코모터(locomotor)의 두 번째 기능: 흔들지레(Rocker) 기능과 전방 움직임, 걷기의 미묘한 조화. 흔들지레는 우리의 걷기를 지지하고 안정시키는 효과적인 메커니즘입니다. 이 글에서는 걷기
naturediaries-i.tistory.com
[ 이전 글 ]
"보행 기능적 단위 ; 로코모터(locomotor)의 4가지 핵심 기능 (1-2)"
"보행 기능적 단위 ; 로코모터(locomotor)의 4가지 핵심 기능 (1-2)"
보행 기능적 단위 ; 로코모터(locomotor)의 4가지 핵심 기능 (1-2). 걷는 행위의 다양한 측면을 살펴보며, 몸이 어떻게 효과적으로 걸음을 만들어내고 유지하는지에 대해 알아보는 글입니다. "보행 기
naturediaries-i.tistory.com
'보행, 걸음' 카테고리의 다른 글
| "보행, 로코모터(locomotor)의 세 번째 기능: 충격 흡수 (1-2-3)" (0) | 2023.12.24 |
|---|---|
| "보행, 로코모터(locomotor)의 두 번째 기능: 흔들지레(Rocker) 기능과 전방 움직임, 걷기의 미묘한 조화(1-2-2)" (2) | 2023.12.20 |
| "보행 기능적 단위 ; 로코모터(locomotor)의 4가지 핵심 기능 (1-2)" (3) | 2023.12.17 |
| "패신저(passenger)의 무용: 걷는 예술의 해부학 (1-1)" (2) | 2023.12.16 |
| "신체의 조화, 보행(Gait)의 핵심: 패신저(Passenger)와 로코모터(locomotor) (1)" (1) | 2023.12.14 |



